{% include head.html %}
ハッシュ法では様々な衝突回避方法が考案されている。
- 連鎖法(チェイン法)
- 開番地法(Open addressing)
- 線形走査法
以下では、格納データ数を
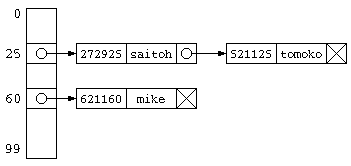
ハッシュテーブルの各番地をリスト構造にし、1つの番地に複数のデータを格納する方法を 連鎖法 という。
- 探索コスト
- データ件数が少なければ、ハッシュ関数の計算のみでよく、$O(1)$
- データ件数が多いと、平均長
$N/M$ のリスト探索が必要になり、$O(N)$
- 利点:いくらでもデータを格納できる
- 欠点:データ件数が多いと計算量が
$O(N)$ になってしまう
衝突が起きた際に、なんらかの方法で別の空いているアドレスを探す方法を 開番地法 という。ただし、要素の削除で削除記号を残す工夫が必要である(設問2の回答 を参照)。
主要な手法に以下の3つがある。
- 線形走査法
- 二重ハッシュ法
- 均一ハッシュ法
衝突が起きるたびに、番地を1つずつずらしていく方法。
1つ目の
ただし、再ハッシュのたびに連続した領域を使うため、データが偏った領域に格納される現象 クラスター(clustering)が発生する場合がある。
衝突が起きるたびに、要素ごとにランダムな大きさ だけずらす1。 $$ h_k(x) = h(x) + kg(x) \mod M $$
データの探索アルゴリズム、挿入アルゴリズム、削除アルゴリズムをそれぞれ簡潔に記述せよ。
ハッシュ関数の列を
また、挿入・削除・探索を行うデータを
del が格納された番地)が見つかり次第、そこに挿入する。
はじめに del を挿入する。
- はじめに
$i=1$ とする。 - ハッシュテーブルの
$h_i(x)$ 番地を参照し、そこに$x$ が格納されていれば$h_i(x)$ が$x$ のアドレスであるので、探索を終了する。 -
$h_i(x)$ に削除を行った履歴であるdelが入っていた場合、$i=i+1$ として Step2からやり直す。 -
$h_i(x)$ に何も格納されていなかった場合、探索を打ち切る。この場合、$x$ はハッシュ表に格納されていない。
この現象を説明し、さらに、これを回避する開番地法の別の方法を複数、説明せよ。
開番地法のまとめ を参照
- 福井高専の講義ページ:連鎖法、開番地法
- ブログ:開番地法の詳細
- ブログ:二重ハッシュなど
- 高知工科大学院の講義ページ:二重ハッシュ法など
設問1,3:各12点
設問2,4:各13点
(50点満点)
{% include foot.html %}
Footnotes
-
$g(x)=1$ とすれば、線形走査法になる ↩