December 2020
tl;dr: Mapping and online detection of TFL.
Traffic light state perception is the key.
Even in non-autonomous vehicles, traffic light state detection would be beneficial alerting inattentive drivers to changing light status and making intersections safer. --> TLA
The key to safe operation is the ability to handle common failure cases, such as FP or transient occlusion for camera based TFL perception.
- TFL tracking and triangulation according to Optimal Ray Intersection For Computing 3D Points From N-View Correspondences.
- Temporal filtering with hysterisis: only change light state when several frames of identical color detection have occurred sequentially. This adds a fraction of a second latency but the response time still matches or is better than that of a human.
- Camera with fixed camera
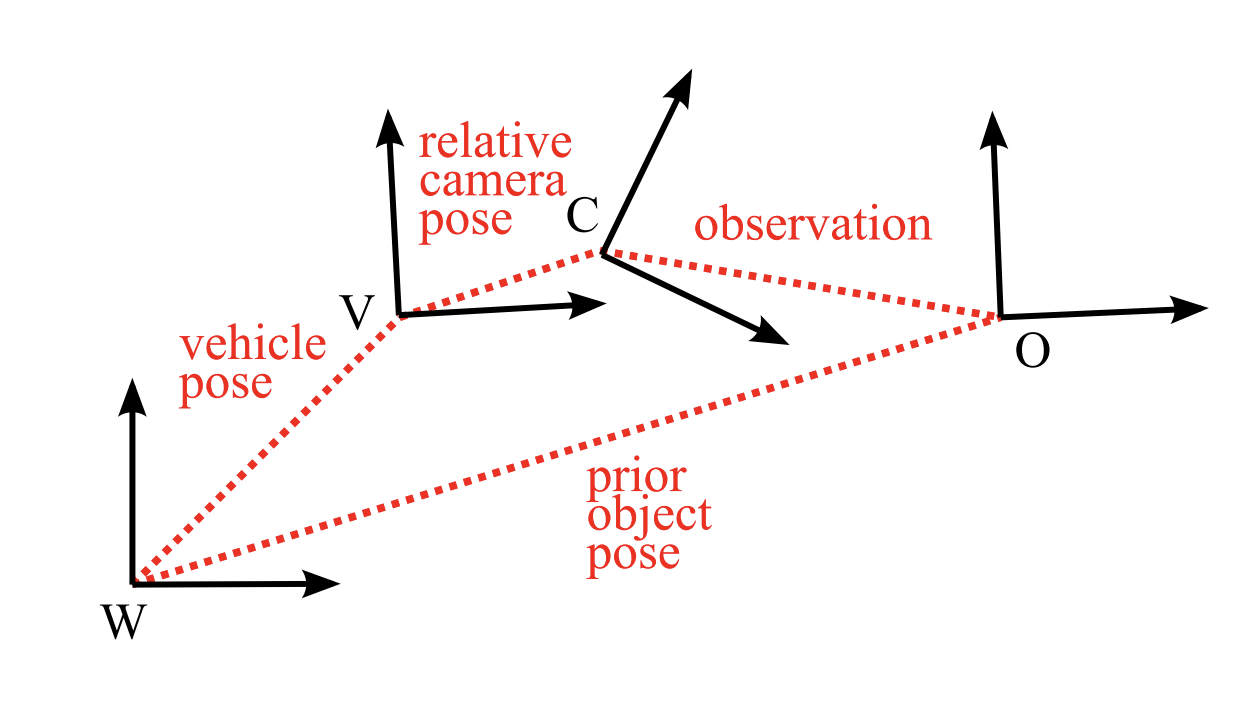
- Coordinate transformation: world, vehicle, camera and object
- Traffic light color hue histogram

- Questions and notes on how to improve/revise the current work