Useful Links & references
Should be worth taking a look at: https://github.com/davetcoleman/moveit_simple_grasps
Godel[4] (Also it is a fantastic example for integrating decartes[5])
Units, orientation conventions, chirality, rotation representations, and covariance representations are covered in REP 103[6]
Please check more in tf2 ROS wiki[7] - chapter Coordinate Frame Conventions.
IMPORTANT: standardize on SI units[8] - important ones in our application: Metre(m), kilogram(kg), second(s), kelvin(K), randian(rad), newton(N).
Chirality: all frame systems are right-handed[9]
Axis Orientation:
- x forward
- y left
- z up
Rotation representation: (prefered order listed)
- quaternion
- rotation matrix
- fixed axis roll, pitch, yaw about x, y, z axes respectively
(related to RSI communication between program server and robot controller server) RTOS wiki[10] and RT-Preempt Patch[11] - a (soft) real time patch for linux kernal.
prc component layout, courtesy of [Braumann 2015][12].

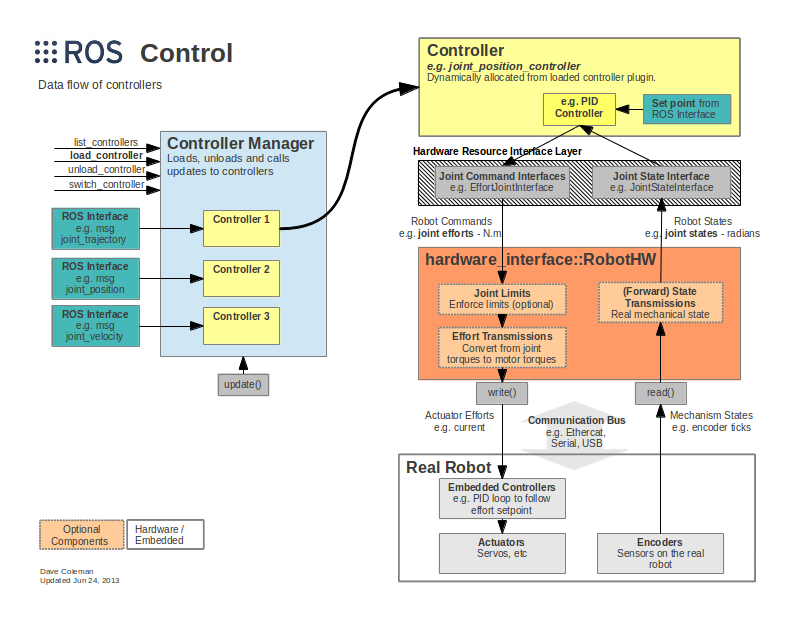
A high-level overview of the project can be found in the ROScon 2014 talk entitled ros_control: An overview (slides, video).

[1] https://gitlab.com/InstitutMaupertuis/simple_rviz_plugin
[2] https://gitlab.com/InstitutMaupertuis/ros_advanced_ci_test
[3] https://gitlab.com/InstitutMaupertuis/simple_rostest
[4] https://github.com/ros-industrial-consortium/godel
[5] https://github.com/ros-industrial-consortium/descartes
[6] http://www.ros.org/reps/rep-0103.html
[8] https://en.wikipedia.org/wiki/International_System_of_Units
[9] http://en.wikipedia.org/wiki/Right-hand_rule
[10] https://en.wikipedia.org/wiki/Real-time_operating_system
[11] https://rt.wiki.kernel.org/index.php/RT_PREEMPT_HOWTO
[12] Braumann, J and Brell-Cokcan, S 2015, ‘Adaptive Robot Control’, Proceedings of the 33rd eCAADe Conference, Vienna, Austria