Batch
Batch Filter estimates the intial position given the history of future measurments.
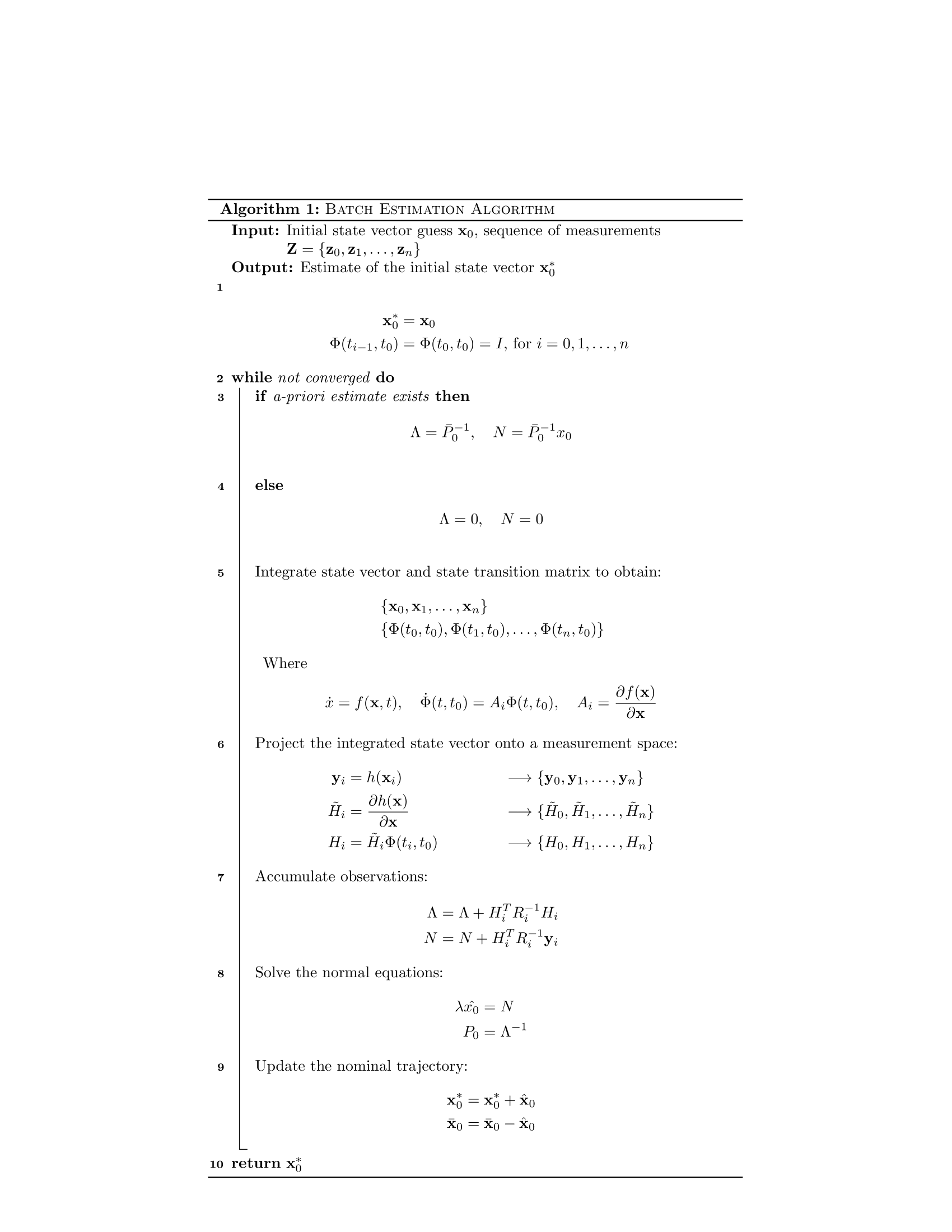
Satellite and observer state vectors are represented in Earth-Centered Inertial (ECI) coordinate frame:

Given the slant range rate equation:
![]()
The Jacobian of range rate measurement with respect to the state is as follows:

In case of multiple stations, the measurement are stacked:
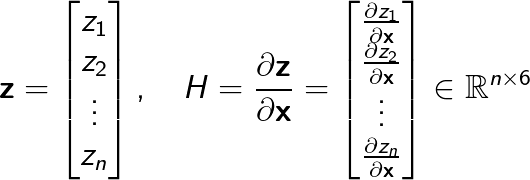
So the batch filter update matrix dimensionality is correct:

Using three or more stations ensures the possibility of convergence onto the true satellite position.