-
Notifications
You must be signed in to change notification settings - Fork 3
Commit
This commit does not belong to any branch on this repository, and may belong to a fork outside of the repository.
Imported upstream version '2.3.0' of 'upstream'
- Loading branch information
Showing
233 changed files
with
38,957 additions
and
0 deletions.
There are no files selected for viewing
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -0,0 +1,17 @@ | ||
| # http://editorconfig.org | ||
| root = true | ||
|
|
||
| [*] | ||
| indent_style = space | ||
| indent_size = 2 | ||
| charset = utf-8 | ||
| trim_trailing_whitespace = true | ||
| insert_final_newline = true | ||
| max_line_length = 100 | ||
|
|
||
| # Use 4 spaces for the Python files | ||
| [*.py] | ||
| indent_size = 4 | ||
|
|
||
| [*.md] | ||
| trim_trailing_whitespace = false |
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -0,0 +1,20 @@ | ||
| name: CI | ||
|
|
||
| on: [push, pull_request] | ||
|
|
||
| jobs: | ||
| industrial_ci: | ||
| strategy: | ||
| matrix: | ||
| env: | ||
| - {ROS_DISTRO: humble, ROS_REPO: testing} | ||
| - {ROS_DISTRO: humble, ROS_REPO: main} | ||
| - {ROS_DISTRO: iron, ROS_REPO: testing} | ||
| - {ROS_DISTRO: iron, ROS_REPO: main} | ||
| - {ROS_DISTRO: rolling, ROS_REPO: testing} | ||
| - {ROS_DISTRO: rolling, ROS_REPO: main} | ||
| runs-on: ubuntu-latest | ||
| steps: | ||
| - uses: actions/checkout@v1 | ||
| - uses: 'ros-industrial/industrial_ci@master' | ||
| env: ${{matrix.env}} |
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -0,0 +1,15 @@ | ||
| #!/usr/bin/env bash | ||
|
|
||
| # Enable the ros2-testing repository | ||
| sed 's#ros2#ros2-testing#' /etc/apt/sources.list.d/ros2-latest.list | tee >> /etc/apt/sources.list.d/ros2-latest.list | ||
|
|
||
| # Install colcon, we need it and it's not installed by default | ||
| apt-get update | ||
| rosdep update | ||
| apt-get install -y build-essential python3-colcon-ros | ||
|
|
||
| cd /ws | ||
|
|
||
| # Use rosdep to install the rest of the package's dependencies, then build it | ||
| rosdep install src --from-paths -i -y | ||
| colcon build |
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -0,0 +1,15 @@ | ||
| language: generic | ||
|
|
||
| services: | ||
| - docker | ||
|
|
||
| jobs: | ||
| include: | ||
| - stage: compile | ||
| name: 'ROS Dashing' | ||
| script: | ||
| - exec docker run -a STDOUT -a STDERR --rm -v $(pwd):/ws/src/mapviz ros:dashing /ws/src/mapviz/.ros2_build.sh | ||
| - stage: compile | ||
| name: 'ROS Eloquent' | ||
| script: | ||
| - exec docker run -a STDOUT -a STDERR --rm -v $(pwd):/ws/src/mapviz ros:eloquent /ws/src/mapviz/.ros2_build.sh |
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -0,0 +1,24 @@ | ||
| Copyright (c) 2014, Southwest Research Institute® (SwRI®) | ||
| All rights reserved. | ||
|
|
||
| Redistribution and use in source and binary forms, with or without | ||
| modification, are permitted provided that the following conditions are met: | ||
| * Redistributions of source code must retain the above copyright | ||
| notice, this list of conditions and the following disclaimer. | ||
| * Redistributions in binary form must reproduce the above copyright | ||
| notice, this list of conditions and the following disclaimer in the | ||
| documentation and/or other materials provided with the distribution. | ||
| * Neither the name of Southwest Research Institute® (SwRI®) nor the | ||
| names of its contributors may be used to endorse or promote products | ||
| derived from this software without specific prior written permission. | ||
|
|
||
| THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS "AS IS" AND | ||
| ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO, THE IMPLIED | ||
| WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR PURPOSE ARE | ||
| DISCLAIMED. IN NO EVENT SHALL <COPYRIGHT HOLDER> BE LIABLE FOR ANY | ||
| DIRECT, INDIRECT, INCIDENTAL, SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES | ||
| (INCLUDING, BUT NOT LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; | ||
| LOSS OF USE, DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND | ||
| ON ANY THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT | ||
| (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT OF THE USE OF THIS | ||
| SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE. |
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -0,0 +1,11 @@ | ||
| Mapviz [](https://travis-ci.org/swri-robotics/mapviz) | ||
| ====== | ||
|
|
||
| Mapviz is a [ROS](http://www.ros.org/) based visualization tool with a plug-in system similar to [RVIZ](http://wiki.ros.org/rviz) focused on visualizing 2D data. | ||
|
|
||
|  | ||
|
|
||
| Usage | ||
| ----- | ||
|
|
||
| [View the documentation](https://swri-robotics.github.io/mapviz/) for usage information. |
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -0,0 +1,3 @@ | ||
| source 'https://rubygems.org' | ||
| gem 'github-pages', group: :jekyll_plugins | ||
| gem 'just-the-docs' |
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -0,0 +1,60 @@ | ||
| title: "Mapviz" | ||
| description: Modular ROS visualization tool for 2D data | ||
| baseurl: "/mapviz" # the subpath of your site, e.g. /blog | ||
| url: "https://swri-robotics.github.io" # the base hostname & protocol for your site, e.g. http://example.com | ||
| remote_theme: pmarsceill/just-the-docs | ||
|
|
||
| permalink: /:title/ | ||
| exclude: ["node_modules/", "*.gemspec", "*.gem", "Gemfile", "Gemfile.lock", "package.json", "package-lock.json", "script/", "LICENSE.txt", "lib/", "bin/", "README.md", "Rakefile"] | ||
|
|
||
| # Set a path/url to a logo that will be displayed instead of the title | ||
| #logo: "/assets/images/just-the-docs.png" | ||
|
|
||
| # Enable or disable the site search | ||
| search_enabled: true | ||
|
|
||
| # Set the search token separator for hyphenated-word search: | ||
| search_tokenizer_separator: /[\s/]+/ | ||
|
|
||
| # Enable or disable heading anchors | ||
| heading_anchors: true | ||
|
|
||
| # Aux links for the upper right navigation | ||
| aux_links: | ||
| "Mapviz on GitHub": | ||
| - "//github.com/swri-robotics/mapviz" | ||
|
|
||
| # Footer content appears at the bottom of every page's main content | ||
| footer_content: "Copyright © 2020 Southwest Research Institute. Distributed under the <a href=\"https://github.com/swri-robotics/mapviz/tree/master/LICENSE\">BSD 3-Clause license.</a>" | ||
|
|
||
| # Color scheme currently only supports "dark" or nil (default) | ||
| color_scheme: nil | ||
|
|
||
| # Google Analytics Tracking (optional) | ||
| # e.g, UA-1234567-89 | ||
| # ga_tracking: | ||
|
|
||
| plugins: | ||
| - jekyll-seo-tag | ||
|
|
||
| collections: | ||
| plugins: | ||
| output: true | ||
|
|
||
| defaults: | ||
| - scope: | ||
| path: '' | ||
| type: 'plugins' | ||
| values: | ||
| layout: 'plugin' | ||
| parent: 'Plugins' | ||
|
|
||
| compress_html: | ||
| clippings: all | ||
| comments: all | ||
| endings: all | ||
| startings: [] | ||
| blanklines: false | ||
| profile: false | ||
|
|
||
| theme: jekyll-theme-cayman |
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -0,0 +1,27 @@ | ||
| --- | ||
| layout: default | ||
| --- | ||
|
|
||
| {% capture content %} | ||
|
|
||
| # {{ page.title }} | ||
|
|
||
| {{ page.description }} | ||
|
|
||
| {% if page.image and page.image != "" %} | ||
|  | ||
| {% endif %} | ||
|
|
||
| ## Parameters | ||
|
|
||
| {% if page.parameters %} | ||
| {% for param in page.parameters %} | ||
| | {{ param.name }} | {{ param.description | replace: "|","/"}} | | ||
| {%- endfor -%} | ||
| {% else %} | ||
| No parameters. | ||
| {% endif %} | ||
|
|
||
| {% endcapture %} | ||
|
|
||
| {{ content | markdownify }} |
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -0,0 +1,6 @@ | ||
| --- | ||
| title: "Attitude Indicator" | ||
| description: "" | ||
| image: "" | ||
| parameters: | ||
| --- |
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -0,0 +1,8 @@ | ||
| --- | ||
| title: "Coordinate Picker" | ||
| description: "Transforms coordinates of clicked points on the map to a specified frame. The most recent coordinate is placed on the clipboard, and a list of coordinates is displayed in the GUI." | ||
| image: "screenshot_coordinate_picker.png" | ||
| parameters: | ||
| - name: frame | ||
| description: "Coordinate frame into which to transform the clicked point" | ||
| --- |
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -0,0 +1,20 @@ | ||
| --- | ||
| title: "Disparity" | ||
| description: "Overlays a [sensor_msgs::DisparityImage](http://docs.ros.org/api/stereo_msgs/html/msg/DisparityImage.html) onto the display using the ''jet'' color map." | ||
| image: "disparity.png" | ||
| parameters: | ||
| - name: Topic | ||
| description: The disparity topic name | ||
| - name: Anchor | ||
| description: (top left | top center | top right | center left | center | center right | bottom left | bottom center | bottom right) | ||
| - name: Offset X | ||
| description: Display offset from the left | ||
| - name: Offset Y | ||
| description: Display offset from the top | ||
| - name: Width | ||
| description: Display width | ||
| - name: Height | ||
| description: Display height | ||
| - name: Units | ||
| description: (pixels | percent of window) | ||
| --- |
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -0,0 +1,6 @@ | ||
| --- | ||
| title: "Draw Polygon" | ||
| description: "Draw a polygon on the canvas and publish to a topic." | ||
| image: "" | ||
| parameters: | ||
| --- |
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -0,0 +1,22 @@ | ||
| --- | ||
| title: "Float" | ||
| description: "Displays the most recent value from a `std_msgs::Float32/64, marti_common_msgs/Float32/64Stamped` or a `marti_sensor_msgs/Velocity` message at a fixed location on the scene." | ||
| image: "" | ||
| parameters: | ||
| - name: "Topic" | ||
| description: "The float topic" | ||
| - name: "Font" | ||
| description: "The font for rendering the float" | ||
| - name: "Color" | ||
| description: "The color for drawing the float" | ||
| - name: "Anchor" | ||
| description: "(top left | top center | top right | center left | center | center right | bottom left | bottom center | bottom right)" | ||
| - name: "Offset X" | ||
| description: "Horizontal offset from the anchor" | ||
| - name: "Offset Y" | ||
| description: "Vertical offset from the anchor" | ||
| - name: "Units" | ||
| description: "(pixels | percent of window)" | ||
| - name: "Postfix" | ||
| description: "Text to append to the displayed value (ex. to show units)" | ||
| --- |
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -0,0 +1,20 @@ | ||
| --- | ||
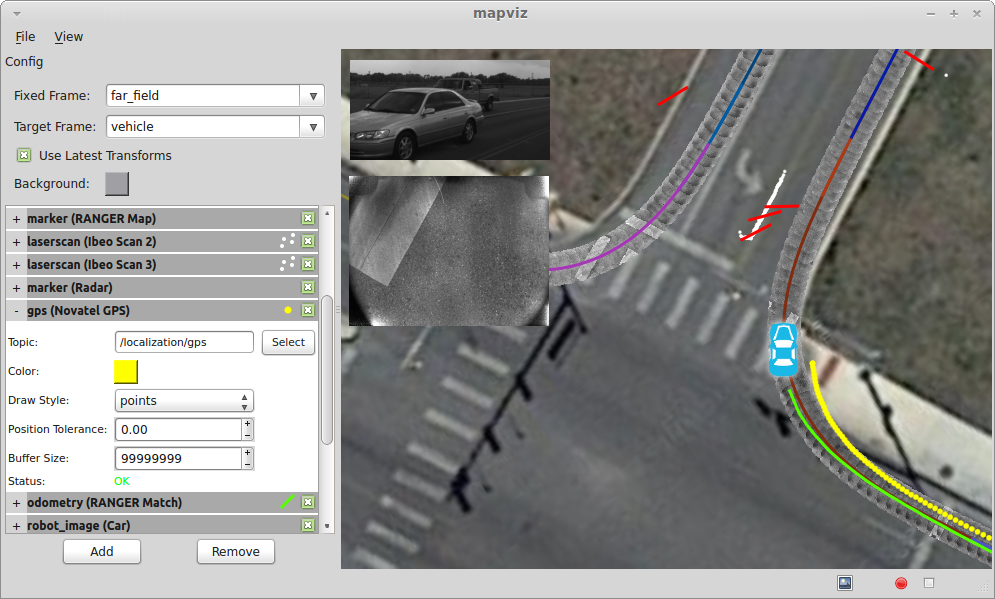
| title: "GPS" | ||
| description: "Projects [gps_common::GPSFix](http://docs.ros.org/kinetic/api/gps_common/html/msg/GPSFix.html) message data into the scene." | ||
| image: "" | ||
| parameters: | ||
| - name: Topic | ||
| description: The GPS topic | ||
| - name: Color | ||
| description: The color of the GPS data | ||
| - name: Draw Style | ||
| description: (lines | points | arrows) | ||
| - name: Static Arrow Sizes | ||
| description: If checked, draw arrows the same size regardless of zoom level; slider adjusts size | ||
| - name: Position Tolerance | ||
| description: Distance threshold for adding new GPS points to visualization | ||
| - name: Buffer Size | ||
| description: Size of circular buffer of GPS points | ||
| - name: Show Laps | ||
| description: If checked, multiple loops of GPS coordinates will have different colors | ||
| --- |
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -0,0 +1,22 @@ | ||
| --- | ||
| title: "Grid" | ||
| description: "Projects a 2D grid into the scene." | ||
| image: "" | ||
| parameters: | ||
| - name: Frame | ||
| description: Coordinate frame of the grid | ||
| - name: Color | ||
| description: Color of the grid | ||
| - name: Alpha | ||
| description: Alpha transparency of the grid | ||
| - name: X | ||
| description: X offset of the grid from the specified coordinate frame origin | ||
| - name: Y | ||
| description: Y offset of the grid from the specified coordinate frame origin | ||
| - name: Size | ||
| description: Size of each grid cell | ||
| - name: Rows | ||
| description: Number of grid rows | ||
| - name: Columns | ||
| description: Number of grid columns | ||
| --- |
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -0,0 +1,20 @@ | ||
| --- | ||
| title: "Image" | ||
| description: "Overlays a [sensor_msgs::Image](http://docs.ros.org/api/sensor_msgs/html/msg/Image.html) onto the display." | ||
| image: "" | ||
| parameters: | ||
| - name: Topic | ||
| description: The image topic name | ||
| - name: Anchor | ||
| description: (top left | top center | top right | center left | center | center right | bottom left | bottom center | bottom right) | ||
| - name: Offset X | ||
| description: Display offset from the left | ||
| - name: Offset Y | ||
| description: Display offset from the top | ||
| - name: Width | ||
| description: Display width | ||
| - name: Height | ||
| description: Display height | ||
| - name: Units | ||
| description: (pixels | percent of window) | ||
| --- |
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -0,0 +1,20 @@ | ||
| --- | ||
| title: "LaserScan" | ||
| description: "Projects a [sensor_msgs::LaserScan](http://docs.ros.org/api/sensor_msgs/html/msg/LaserScan.html) message into the scene." | ||
| image: "" | ||
| parameters: | ||
| - name: "Topic" | ||
| description: "The laser scan topic name" | ||
| - name: "Min Color" | ||
| description: "The color associated with minimum return intensity" | ||
| - name: "Max Color" | ||
| description: "The color associated with maximum return intensity" | ||
| - name: "Min Intesity" | ||
| description: "Minimum intensity value" | ||
| - name: "Max Intensity" | ||
| description: "Maximum intensity value" | ||
| - name: "Point Size" | ||
| description: "Display size of laser scan points in pixels" | ||
| - name: "Buffer Size" | ||
| description: "Size of circular buffer of laser scan messages points" | ||
| --- |
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -0,0 +1,10 @@ | ||
| --- | ||
| title: "Marker" | ||
| description: "Projects a [visualization_msgs::Marker](http://docs.ros.org/api/visualization_msgs/html/msg/Marker.html) or [visualization_msgs::MarkerArray](http://docs.ros.org/api/visualization_msgs/html/msg/MarkerArray.html) into the scene. | ||
| [Markers](http://wiki.ros.org/rviz/DisplayTypes/Marker) are the most flexible display type and more or less mirror the [OpenGL primitives](https://www.opengl.org/wiki/Primitive)." | ||
| image: "" | ||
| parameters: | ||
| - name: "Topic" | ||
| description: "The marker topic" | ||
| --- |
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -0,0 +1,6 @@ | ||
| --- | ||
| title: "Measuring" | ||
| description: "Measure distance on the canvas with the mouse." | ||
| image: "" | ||
| parameters: | ||
| --- |
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -0,0 +1,6 @@ | ||
| --- | ||
| title: "Move Base" | ||
| description: "Allows the user to send goals to [move_base](wiki.ros.org/move_base)." | ||
| image: "" | ||
| parameters: | ||
| --- |
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -0,0 +1,8 @@ | ||
| --- | ||
| title: "Multi-Res Image" | ||
| description: "Projects a geo-referenced multi-resolution image tile map into the scene. The concept is the same as the Google Maps style pan/zoom satellite imagery." | ||
| image: "multires2.png" | ||
| parameters: | ||
| - name: "Geo File" | ||
| description: "Path to the geo-referenced map tiles." | ||
| --- |
Oops, something went wrong.